




歩行について
歩行は、省エネでの移動を実現するために、非常に合理的、効率的に行われています。
今回は歩行のメカニズムを理解するうえで重要な倒立振子モデルとエネルギーの変換についてお伝えします。
◎倒立振子モデルとは?
人間の歩行を簡素化すると、倒立振子モデルで表すことができます。
振り子が倒立(逆さま)になっています。
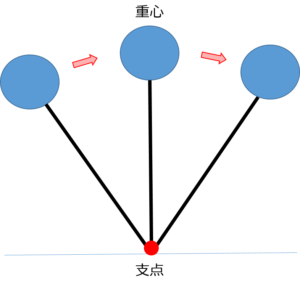
床に触れている部分を支点に、重りが動きます。
これを人に当てはめてみると、こうなります。
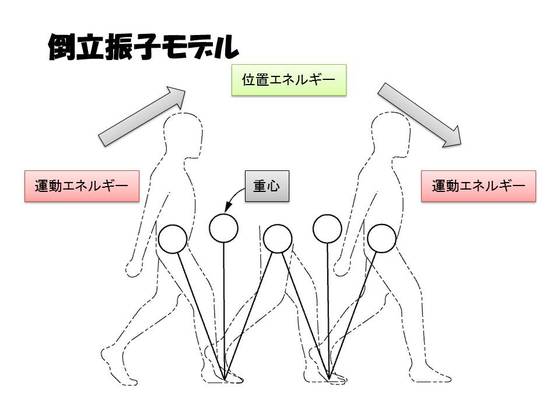
支点部分が足部、重心が骨盤となり、位置エネルギーを運動エネルギーに繰り返し変換することによって、
楽に前方に進むことできます。
◎位置エネルギーと運動エネルギー
エネルギーの変換など小難しい話になりそうですが、意外と簡単なんです。
歩行時におけるこの2つのエネルギーの関係は、よくジェットコースターにたとえられます。
ジェットコースターが最も高い位置にあるときに、位置エネルギーは最大になります。
そこから勢い良く降っていくときに、位置エネルギーが運動エネルギーに変換されることで前方に進みます。
そして、その勢いを使って一番高い位置まで登り、また勢い良く降って……を繰り返します。
人間の歩行に置き換えると、左右の足が交互に骨盤(=重心)を上下動させて、位置エネルギーを運動エネルギーに変換することを繰り返していると言えます。
もし骨盤が上下動せずに一定の高さで歩いた場合、位置エネルギーを運動エネルギーに変換できません。
そのときには、一体何を使って前に進む力を得るのでしょうか?
それは筋肉です。
エネルギーの変換が行えず筋肉だけで推進力を生み出すことは、非常に負担がかかります。
すぐに疲労が溜まり、長い距離を歩くことが難しくなります。
歩くとすぐに疲れてしまう方は、このような歩行をしているのかもしれません。
骨盤の上下動は、効率的な歩行に欠かせないものなのです。